|||
|
|
🗝 Login
🤖 Create Account
Main Menu
🚤 Model Boats
• Forum
• Build Blogs
• Media Gallery
• Boat Clubs & Lakes
• Events
• Boat Harbour
• How-To Articles
• Plans & Docs
• Useful Links
This Website
🔍 Search
📝 Guestbook
👨👩👧👦 Members (7,882)
📖 Quick Site Guide
📣 Support
👥 Membership
Hobby Supplies
🛍️ Online Shop
Not Registered
Go AD FREE & get your membership medal
BRONZE
Less Ads
SILVER
GOLD
Ad Free
Cancel
Anytime
Anytime
£2.50
£4.50
£6.50
Subscribe
Go AD FREE & get your membership medal
BRONZE
Less Ads
SILVER
GOLD
Ad Free
For A Whole Year!
£25
£45
£65
Donate
You Will Be Helping Towards:
Domain Fees
Security Certificates
iOS & Android App Fees
Website Hosting
Fast Servers
Data Backups
Upkeep & Maintenance
Administration Costs
Without your support the website wouldn't be what it is today.
Please consider donating towards these fees to help keep us afloat.
Read more
All donations are securely managed through PayPal.
Many thanks for your kind support
Without your support the website wouldn't be what it is today.
Please consider donating towards these fees to help keep us afloat.
Read more
All donations are securely managed through PayPal.
Many thanks for your kind support
Join Us On Social Media!

|

|

|
Download The App!
Login To
Remove Ads
Remove Ads
Login To
Remove Ads
Remove Ads
🏝️ About This Website
☝️ Terms of Service
🔏 Privacy Policy
Model Boats Website
Model Boats Website
Home
Forum
Build Blogs
Media Gallery
Boat Clubs & Lakes
Events
Boat Harbour
How-To Articles
Plans & Docs
Useful Links
Welcome to the Model Boats Website! A place for all model boaters!
Feel free to browse through the website, ask your questions, upload your photos or even start your own blog!
Feel free to browse through the website, ask your questions, upload your photos or even start your own blog!
Login To
Remove Ads
Remove Ads
Today's Question
Where is scuba equipment usually used?
ANSWER >>
>
Today's Wordle
7 LETTERS
>
Trending Now
Forum
Quick snap on coupling
I believe he is looking for something like the one in my picture.
I have this one, but need several more, and also don't know where to find them.
I will be watching this thread, in hopes of somebody identifying it and where to get them.
Dave B
🇺🇸 DWBrinkman

3 minutes ago
Forum
Wordle of the Day?
Used the clue to enter that I used the clue in the logbook. At 4.
🇺🇸 Cashrc

58 minutes ago
Forum
In Loving Memory of my dad Peter, aka Mallory.
Passing along prayers of strength to you Stephen and your family; on (as you described) a life well lived.
🇺🇸 jumpugly
1 hour ago
Forum
UK Coastal Forces
I have just found this splendid film from WW2. Some great footage of MTBs.
https://youtu.be/lzJDVhuMaI8?si=lbiJJizuXVkdwoHr
🇬🇧 Nickthesteam
3 hours ago
Forum
Light at the end of the tunnel?
It may be taking a while, but progress is now possible.
🇺🇸 Peejay
4 hours ago
Blog
More Progress
There are a lot of frames on this bad boy. It is going to be heavier than I expected. I am going to get more done Thursday through Sunday as I recover. Hoping to begin planking. Have to verify placement and height of the frames, deck, then plank.
🇺🇸 KevinH

7 hours ago
Place
Stade, Germany
Hello Doug Yes, that is the jetty on the "Schwinge" directly at the "Stadeum" Have you already been here in Stade?
🇩🇪 Wolle
7 hours ago
Forum
2nd competition
You may find something useful in this thread that would give you the confidence to fill the boiler and light the flame! >>>>>>
https://www.modelboatmayhem.co.uk/forum/index.php?topic=68100.0
🇬🇧 Razor1955

8 hours ago
Forum
Question of the Day?
Garth yes. They were taught by humans.
🇿🇦 Rudy-M

8 hours ago
Blog
Re: About to start the glass fibre
Feel free to ask any questions Alessandro, and I will do my best to answer.
🇬🇧 Trident73
9 hours ago
Harbour
Re: Artesania Latina 20201 Amsterdam
Thank you all for the kind comments.
I agree, my boat does look like the currently offered "Atlantic".
However, it is indeed the now discontinued "Amsterdam".
I am not aware of what the differences are, as they look VERY similar.
*I see some differences at the top of the superstructure. It looks to be somewhat simplified.
There must be some reason Artesania Latina reintroduced it as the Atlantic.
If anybody knows the history or reasoning behind this, I'd love to hear it.
Here is all I can find about it:
If you loved Amsterdam RC, our new Atlantic RC will shock you.
This model has become one of our best-sellers. His wonderful finishing and his capabilities in the water makes Atlantic RC simply wonderful.
Moreover, this maquette made in wood and plastic is a faithful replica of the tugboats of the 70s and 80s.
Do you want to know more about this model? Then, you have to follow this link: https://bit.ly/3hOOirh
🇺🇸 DWBrinkman
12 hours ago
Blog
British Power Boat 70ft Motor Gunboat.
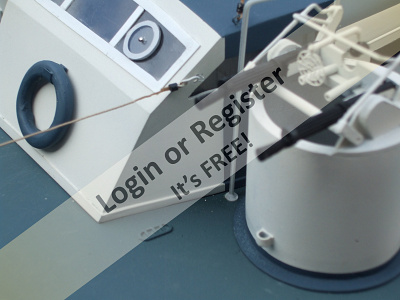
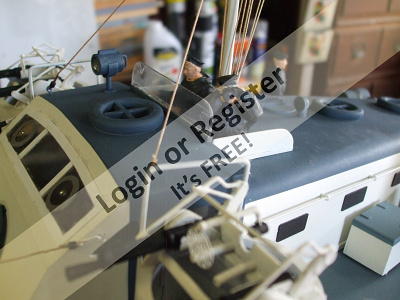
Crew figures from Shapeway 3d print not cheap.Motors are two brushed 545 with a 3s lipo for each motor.
Nomally i would use brushless motors for this boat i used what i had in workshop
Real boat was 70ft in length model is 35" length at 1/24 scale.
🇦🇺 grahams
17 hours ago
Forum
Flight Link Control Launch Link 2 channel radio control set
Yes Isaac, my main hobby is predominantly model flying!
🇬🇧 Stuart Mackay
1 day ago
Blog
Re: NQD PX-16
I'm not too sure what your are trying to achieve with the two motors, two ESCs, and a "Y" cable plug and the mixing.
I watched the video and I also use a few I6X radios (plus others). I don't see how this all would work on one channel. Several of my boats have multiple motors and props.
Perhaps if you could sketch out a schematic or an explanation on what you are trying to do, one or more of us can help.
Lew
Florida ️, USA
🇺🇸 LewZ
1 day ago
Forum
Edina Model Yacht Club Season Opener
Great place Dave, thanks for sharing your videos with us.
I feel sorry for the sailboats, it seems there was no wind for them.
🇮🇹 AlessandroSPQR

1 day ago
Forum
If only
It was always my ambition to build a full size dinghy - albeit somewhat smaller than the one in the picture. I have to accept this will never happen now.
Selway Fisher designs often follow similar construction to model boats and indeed he has a series of designs specifically to be built as models >>
https://www.selway-fisher.com/sfdesign_model_boats.htm
🇬🇧 Razor1955
1 day ago
|

New Member
United Kingdom
 FrankJ
FrankJ11 hours ago
New Member
United Kingdom
Robin Starfish12 hours ago
New Member
United Kingdom
DouglasS14 hours ago
New Member
United Kingdom
Farlam18 hours ago
New Member
Australia
PeterJ21 day ago
New Member
Germany
AudronisB1 day ago
New Member
United Kingdom
Gsf12501 day ago
New Member
United Kingdom
BarryM2 days ago
New Member
United Kingdom
gary22 days ago
New Promotion
Leading Seaman
grahams2 days ago
New Member
Italy
FrancescoF2 days ago
New Member
United Kingdom
BrianC23 days ago
New Promotion
Midshipman
Isaac3 days ago
New Member
United States
LeeA3 days ago
Birthday This Week
Turns 64
 Rob
Rob4 days ago
New Promotion
Leading Seaman
Stuart Mackay4 days ago
New Member
Canada
RayR4 days ago
Birthday This Week
Turns 66
 ARL58
ARL584 days ago
New Member
United Kingdom
DavidS64 days ago
New Member
United Kingdom
IAND24 days ago
Account Updated
Changed Avatar
Stuart Mackay4 days ago
New Member
United Kingdom
NancyR5 days ago
New Promotion
Leading Seaman
Razor19555 days ago
New Member
Australia
PhilipS15 days ago
New Member
United Kingdom
N1ck down the quay5 days ago
New Member
United Kingdom
JohnG15 days ago
Account Updated
Updated 'About Me'
LOBOLONDON5 days ago
Birthday This Week
Turns 73
firepaddy16176 days ago
New Member
United Kingdom
Stuart Mackay6 days ago
New Member
Germany
RalfZ6 days ago
New Member
Canada
BubR6 days ago
New Promotion
Commander
jumpugly6 days ago
New Member
United Kingdom
StephenM6 days ago
New Member
United Kingdom
RogerS18 days ago
New Member
Belgium
JohnF38 days ago
New Member
United Kingdom
Alan18 days ago
New Member
United Kingdom
PeterS68 days ago
New Member
United Kingdom
geoff parkes9 days ago
New Member
United Kingdom
Whites1239 days ago
New Member
Canada
BrianR10 days ago
New Member
Netherlands
willemn10 days ago
New Member
United Kingdom
MarkF10 days ago
Birthday This Week
Turns 66
 jugge
jugge10 days ago
New Member
Germany
RainerG10 days ago
Account Updated
Updated 'About Me'
RayJ11 days ago
New Member
New Zealand
RayJ11 days ago
New Member
United Kingdom
robertc311 days ago
New Member
United Kingdom
Ostuartg11 days ago
See More
Forum Topics
Quick snap on coupling
I believe he is looking for something like the one in my picture.
I have this one, but need several more, and also don't know where to find them.
I will be watching this thread, in hopes of somebody identifying it and where to get them.
Dave B
3 minutes ago by 🇺🇸 DWBrinkman ( Lieutenant Commander)
Lieutenant Commander)
Building Related
4 Posts
1 Like
1 Like
Started
15 hours ago
by hermank
15 hours ago
by hermank
Latest
3 minutes ago
by DWBrinkman
3 minutes ago
by DWBrinkman
Wordle of the Day?
Used the clue to enter that I used the clue in the logbook. At 4.🤣
58 minutes ago by 🇺🇸 Cashrc ( Vice Admiral)
Vice Admiral)
Website Related
1322 Posts
2667 Likes
2667 Likes
Started
11 months ago
by fireboat
11 months ago
by fireboat
Latest
58 minutes ago
by Cashrc
58 minutes ago
by Cashrc
In Loving Memory of my dad Peter, aka Mallory.
Passing along prayers of strength to you Stephen and your family; on (as you described) a life well lived.
1 hour ago by 🇺🇸 jumpugly ( Commander)
Commander)
Non-Hobby Chat
13 Posts
57 Likes
57 Likes
Started
15 hours ago
by fireboat
15 hours ago
by fireboat
Latest
1 hour ago
by jumpugly
1 hour ago
by jumpugly
UK Coastal Forces
I have just found this splendid film from WW2. Some great footage of MTBs.
https://youtu.be/lzJDVhuMaI8?si=lbiJJizuXVkdwoHr
3 hours ago by 🇬🇧 Nickthesteam ( Commander)
Commander)
Hobby Chit Chat
1 Post
0 Likes
0 Likes
Started
3 hours ago
by Nickthesteam
3 hours ago
by Nickthesteam
No Replies Yet
Light at the end of the tunnel?
It may be taking a while, but progress is now possible. 🤗
4 hours ago by 🇺🇸 Peejay ( Midshipman)
Midshipman)
Non-Hobby Chat
6 Posts
21 Likes
21 Likes
Started
18 hours ago
by Doogle
18 hours ago
by Doogle
Latest
4 hours ago
by Peejay
4 hours ago
by Peejay
|
|
Login To
Remove Ads
Remove Ads
Build Blogs
4 Posts
3 Followers
19 Likes
52' Motor Lifeboat Victory
One of my nine-year projects is coming to an end. I am sad to see it completed in some ways, overjoyed in others. Many projects have been begun and shelved over those nine years; some are in the trash now.
What is known is the 213' WMEC-168 Yocona is hit or miss whether my attempts to waterproof a static hull will be successful. So on hold or a side project.
The Gunboat Philadelphia is on-going at work between shifts.
PBY that doesn't Fly I will place on hold, pending possible actual flight. (That will put three aircraft inline to be completed.)
The battleship North Carolina....Big. Not so complex as physically large undertaking.
SO, begin at the beginning as I tell my students. I pondered purchasing the laser-cut kit from Canada, but it is just frames, deck, and pilothouse. Yes, it is 1" to one foot scale, and would match my 44' MLB perfectly, but $286 plus shipping? For me too much, I will build at 1/24th scale for now. Small enough to store, big enough to detail and outfit with running gear.
My 44 MLB, is a leaky, but I am installing an automatic bilge pump. I get so much joy out of running it, and I will have the tri-fecta of MLB's 36', 44', and 52'. The 213 should be complete around the time I finish, so four CG projects in a years time, plus the Philly is a quick build. So, it is a year, year and a half plan.
This will be a slow one.
Non Boat picture is project that is almost complete.
Kevin
🇺🇸 KevinH
7 hours ago



2 Posts
5 Followers
30 Likes
British Power Boat 70ft Motor Gunboat.
Scratch build of my WW2 B.P.B. 70ft Motor Gun Boat at 1/24 scale.
🇦🇺 grahams
17 hours ago












12 Posts
5 Followers
63 Likes
NQD PX-16
Hi Shipmates,
After many years I finally found one at a good price £20 plus £10 p&p on good old Ebay.
I have a load of hardware sitting around, motors rudders etc. So I decided to play about with this boat.
Generally it is considered a waste of time and money to do anything with these boats.
So I don't expect any 'Likes' on this project, its a bit of a daft thing to do.
Information about 32in long twin stepped catamaran hull, beam 9.25 inches, thin ABS plastic.
First stage.
Unpack and check, strip out all of the hardware, generally unscrew components, most difficult thing was removing the propeller shafts.
Second stage wash hull with warm soapy water (in the Bath) and remove stickers.
🇬🇧 CB90
1 day ago













3 Posts
7 Followers
30 Likes
Graupner Krabbe Ton 12…the kit, not the boat😁
Hi y’all. After building the Caldercraft Clyde Puffer, and taking a break from building for a few weeks, I decided it was time to crank up my bench again. I had originally started on a kit that I got in a trade, a Deans Wacht Am Rhein…this boat had been started some time ago, probably a good decade before I got my hands on it, and it’s been in my kit stash for a good 5 years or so now. The original builder got the rudder and tube installed and the aft and mid deck in place, and some bulwark detail. I was working on a motor mount when I decided I just didn’t want to deal with masts and rigging at this time. At some point I’m going to finish that boat…just not now.
I’ve had a Graupner Krabbe Ton 12 in my kits stash for a bit. It’s the second version, when Graupner reorganized and sent the kit production to Asia, probably KYmodel. Same people who did the SAR rescue boat and the Taucher Wulf did this. It’s a nice little kit, well made, instructions are somewhat between the Tauchers “guidelines” and a Billings kit…better, but not quite there. Now, I know I said I didn’t want to fool around with a bunch of masts and booms and rigging, and the Krabbe has that in spades…so I decided to make something different. I thought about a slightly different take on a Kriegsfischkutter, or maybe a fishing boat to yacht conversion…but, I decided on a simple tug. Basically a 1930s or so diesel or converted steam tug, something smaller that you might see in the Great Lakes.
With that decision out of the way I went to work. First thing I did was to make up a 4mm shaft and tube. I used a Caldercraft Fineline tube that I had stolen the shaft from. I have a small collection of tubes and shafts, and a very few that are complete. Anyway, the kit uses a 3mm unit, and that’s just an odd size. Nothing wrong with it, just most of the props and fittings I’ve seen are for 1/8th, 3/16th, 2mm and 4mm. The 3 mm props and such are just harder to get…so I made up the tube by cutting down the Caldercraft unit to the length I wanted, and using the bushing from the discarded end I built up the tube, and added an oiler.
I then took on the task of choosing my power plant. The kit comes with a motor, a knock off of a Mabuchi RS380. My experience with these motors is that they make good model boat anchors. My first SAR that I built was completely stock, and I ran it on the recommended 6 cell nimh pack. After I had the boat completed and had about 6 good runs on it, she went dead in the water at Towne Lake. We retrieved it, and the motor had gotten hot, and the brush holders had softened from the heat and the brushes were not making contact….never again. I was thinking about my usual outrunner brushless, when I remembered I had a brand new MFA 2.5 to 1 380 sized geared motor in my possession. Went with that. After making up a mount and installing the shaft and tube I did a test run on the bench. At full chat, but no load it’spulling 0.07 amps on a 3 cell lipo.
Once that was squared away I used part of the motor mount/radio tray combo to mount the rudder servo, got the rudder mounted, and started to make up the deck houses.
One nice feature of this kit is that the deck slots into a groove in the hull. There are under deck stringers that are laser cut in the kit, once installed they give the deck a slight beam to beam curve. I used the kit parts to make up the aft coaming and house/hatch, and built up my fwd deckhouse and coming from plasticard. I then built up the wheelhouse using kit components..however, I built the deck and house “inside out”, i.e I’m not using the printed “decking” side as I’m probably going to paint the deck and house vs staining them.
That’s where I’m at now. I think the wheelhouse, as built looks a little too tall. I might leave it as this is supposed to be a small, River or Great Lakes tug, not an ocean going boat, and in some of the pics I looked up to get an idea of how I wanted her to look, some of the real boats had tallish pilot houses. I might cut it down about a half inch, but haven’t made the choice yet. Once I make that decision I’ll finish up the house and start figuring out details and what job this boats going to have…
Cash
🇺🇸 Cashrc
3 days ago















13 Posts
16 Followers
143 Likes
Occre Ulises
Was given the Occre kit of the “Ulises” ocean going tug for Christmas. Started the build this weekend but I reckon it is going to be a bit of a drawn-out build for a while as I have a lot going on with work and other things. I will gradually add photos of my progress…
Re comment about kit suppliedpropshaft - I agree, I didn’t like the look of that one in the kit so I cut down an old one I had from something else, put the bearing back in with the addition of a touch of solder To make sure it stayed there and I added the oiler tube as well by soldering that on.
🇬🇧 Trident73
4 days ago


















23 Posts
20 Followers
266 Likes
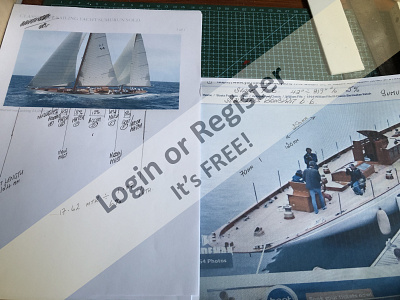
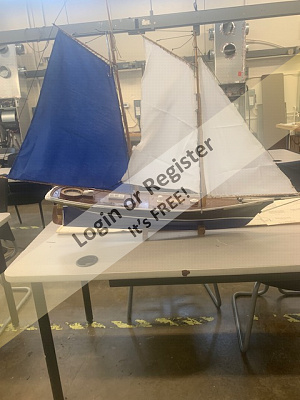
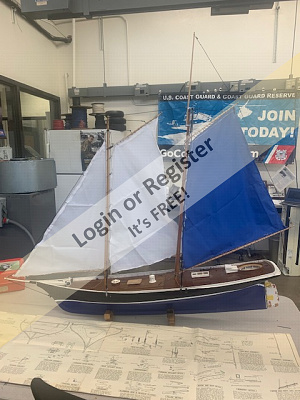
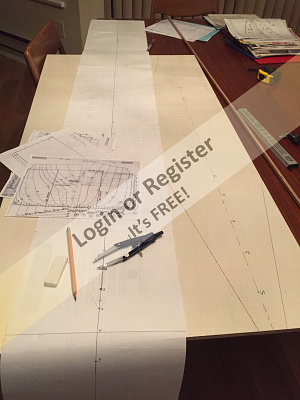
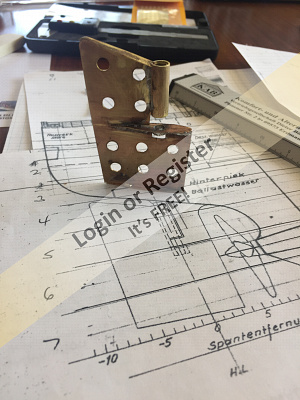
CGINGA IV
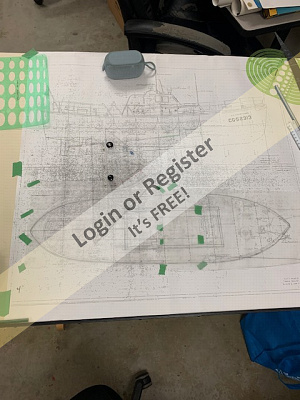
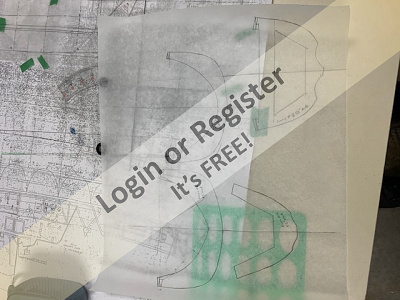
I am pushing the boat out really early in fact in its embryonic stage for this build blog and I might regret it but hope not.
It has been my dream of some weeks that my preferred build for the future would be a great looking motor sailor and the one I settled on was Inga 1v and with encouragement from roycv who has in his harbour a splendid example set the ball rolling.
There does not seem to be much interest out there for this model mainly due to there being is no kits available, nor plans, nor plastic hulls being produced simply lots of pictures and of course some beautiful completed models.
First step and many thanks to tiggy_cat for sending me a set of plans for this model which arrived today. They are produced by Revell and are for the topsides which is great but leaves me with one of the challenges of my life that of drawing, stealing, borrowing whatever a plan of the hull shape. I fear that if I attempt to accurately draw the frames for the hull it might end sailing sideways.
Anyway as somebody once said `I have started so I will finish` interested then watch this space. Regards ChrisG
🇬🇧 ChrisG
4 days ago















16 Posts
10 Followers
130 Likes
1/72 Clyde Puffer
Hi One & All
Back in 1997 I purchased two vacform hull for a 1/72 Clyde Puffer along with the drawings from Sarik (drawing MM1410), as we have been having some bad weather of late and due to their size they started to look like a good boat to start building in the house. (just to keep warm), over the last few weeks I have joined the two half’s of the hull, fitted the motor and shaft, alone with the deck, I have made a mistake when it comes to fixing the rudder, I should have made some form of fixing that went into the hull, so that the rudder had some were to fasten to, (will sort that out later on in the build) also I need to make some form of support for the shaft as I think it will in time work its way lose, moving on, the stern deck has been started and over half has now been planked.
Fred
🇬🇧 Fred
7 days ago

















87 Posts
24 Followers
627 Likes
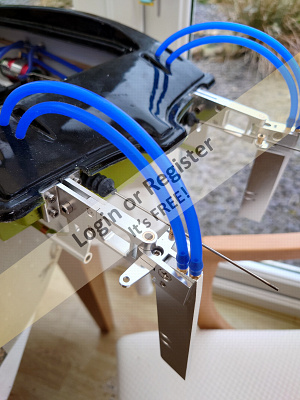
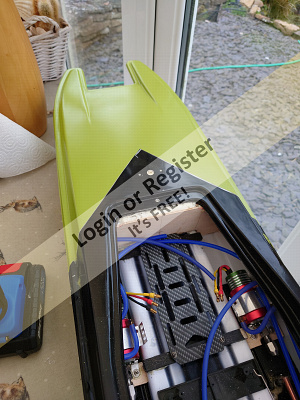
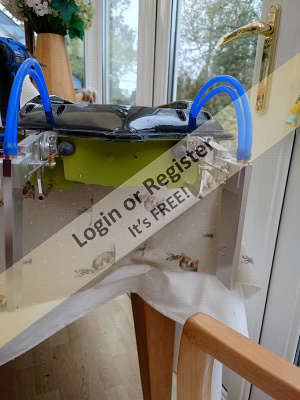
Russian K100D waterjet work boat project
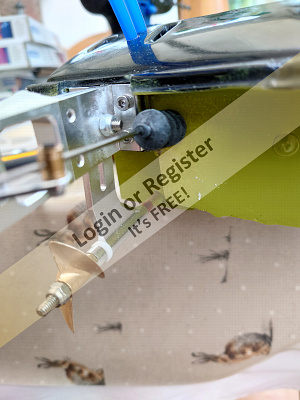
Just having a play with an idea for a model of a early Russian KS 100D general purpose work boat. These were used for river work towing logs etc in shallow rivers . The water jet is unusual, as it has a rear shute with twin rudder type deflectors, and rear hull side ports for reverse (independent controls for each port). Someone on the site mentioned a steam powered water pump driven ship from the 1800s ? a while back on the site which used a similar principal.
The boats were made by the Yaroslavl shipyard, and were very common in the late 50s till (I think) the 70s. Not much info on them but a few guys have rebuilt old ones for pleasure boats. They have a speed of around 16-18knts and used a Yamz 170hp V8 diesel. I've contacted (YT) a guy who has rebuilt one of these boats, and he has fitted the V6 version of this engine.
My attempt is not like the original, as there is no info on the complicated internal deflector system, so I've gone with the next best thing using modified electrical conduit fittings with flap valves. Seems to work ok, but not sealed yet so leaks like a sieve. I'd use a 26mm jet unit for the pump in front of the unit. I'll have to reduce the diameter of the side outlets to get more force behind the jets. Might have to fit the unit in a waterproof tray with a bilge pump. as I think, even though it will be sealed, it will still leak slightly round the 3 shafts.
https://youtu.be/7Lgb7hH6ln8
https://www.youtube.com/watch?v=altwiMdZlIA
https://www.youtube.com/watch?v=yWSI8moMeZg&t=33s
https://www.youtube.com/watch?v=87PsJVdPNhE
https://www.youtube.com/watch?v=CQ3U7XmeG1A (similar later model showing manoeuvrability)
https://www.youtube.com/watch?v=hblw4_44FB8
The big lid on the jet is for clearing weed or similar which might get into the unit.
🇳🇿 jbkiwi

8 days ago
















19 Posts
11 Followers
138 Likes
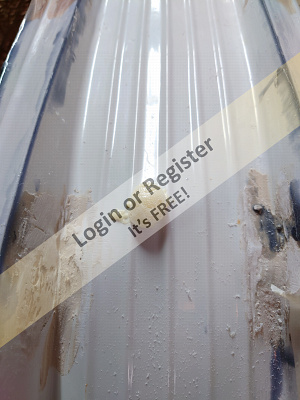
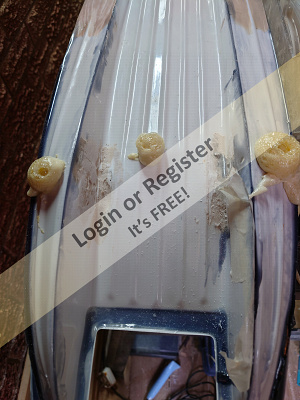
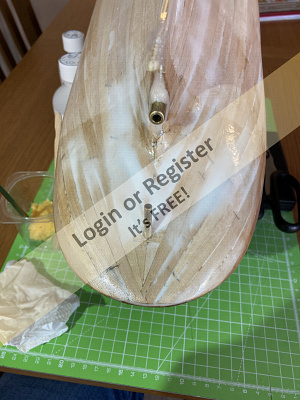
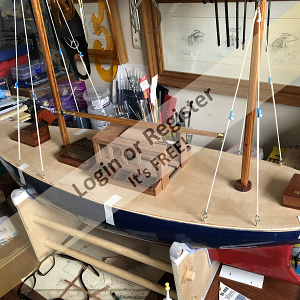
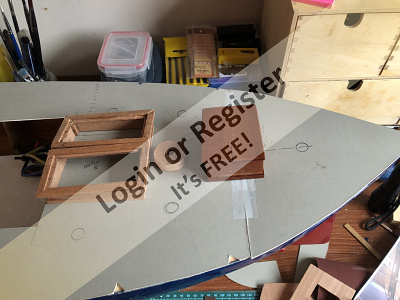
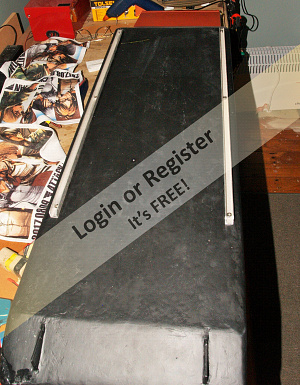
1965 Sterling Yacht America
My last words were "Complete the 44' MLB, then work on a non-boat project." The problem was, as you can see in the back-round inside that large sailboat hull, a 110' WPB patrol boat hull, with plans, not seen, the gunboat Philadelphia in a box in the truck, on top of that in the backseat is the 75% finished hull of a PBY flying boat. There are also unbuilt R/C aircraft kits X2 somewhere in the area, plus two ARF aircraft. (DHC-2 Beaver, and a Cessna 182, also in that ship's hull.)
But my friends, last night I had a dream, and in it was of a gloss black, full rigged sailing yacht. Reasons, number one, the hull is straight and already built, I purposely purchased a hand-held sewing machine for sails, I figure i will need it for the Philadelphia as well.
So, this week we begin, the rigging, and instructions for the same are pretty clear. I included that note from "Rob", because "Mark, or Rob" if you are out there, your "once vision" will be challenging the British in about nine months.
I hope Fair Winds are in all of our futures.
Kevin
🇺🇸 KevinH
9 days ago















1 Post
1 Follower
4 Likes
CalMac landing craft ferry-Mv Carvoria
I’ve been gifted a ready- made wooden pontoon style hull which I’m adapting into a model of the smallest CalMac ferry operating to the island of Kerrera from Gallanach(Oban)
The vessel is 12 m long and can carry up to 12 pax & 1 small vehicle . Motive power is a pair of Honda 80 outboard motors.
My model will be approx 1:24 scale powered by a brushed motor, with twin rudders. Eventually I intend to make dummy motors for the stern .
I am in dire need of some suitable CalMac decals . If anyone still has any surplus BECC ones from their own build I’d gladly make you an offer!
First pic with mock-up wheelhouse( probably oversize at moment!)
Progress reports in due course
🇬🇧 Peewit83
9 days ago


6 Posts
9 Followers
49 Likes
Scratchbuilt Esso Deutschland 1:150
When I first posted a thread under ... a dreamproject.. I didn't realize it was the wrong forum category. So here is my built blog. I will spare you the original introduction as I have made progress which and most of you are already familiar with my project.
The hull was built merging 2 methods on a simple keel plate from plywood, bow and stern structure bread and butter and hull in between 3mm planks on frame.
The entire main deck is intended to be removable with a drainage irrigation system of plastic corner moulding (from a building supplier) along top of hull and flush at poop and back deck structure. The deck is made of 1/4" plywood skeletal structure incorporating midship deckhouse. Hull glassed with lightest cloth available after 2 coats 2-epoxy sealer and paint primer followed by final coat except top (above waterline) grey will be applied once I have finished doing any necessary adjustments. There have been a lot of them since I realized many inaccuracies in dims etc. I wasn't happy with.
Here are photos in the progress (some may have already been posted in the original post.
More a bit later next week.
🇨🇦 JockScott
13 days ago















53 Posts
16 Followers
258 Likes
BLUENOSE
Started 2020 with plans by P F Eisnor from Nova Scotia
34 pairs of ribs
🇨🇦 RossM
18 days ago









|
|
Media Gallery
INGA IV
19 days ago by philcaretaker
Lake Union Dreamboat
21 days ago by Brightwork
1958/9 50/55' Chris Craft Constellation
22 days ago by Brightwork
Filming "Dinghy Dan"
1 month ago by philcaretaker
"Dinghy Dan"
1 month ago by philcaretaker
"Dan, Dan the Dinghy Man"
1 month ago by philcaretaker
"Dinghy Dan"
1 month ago by philcaretaker
RNLI Severn Class
1 month ago by Rudy-M
Onboard a Focus 2 RC yacht
1 month ago by Rudy-M
Andy sails Topaz with df65's
1 month ago by MartinH2
RC Shark vs Orca?
1 month ago by Rudy-M
Topaz 60" J class yacht
1 month ago by MartinH2
|
|

Login To
Remove Ads
Remove Ads
Boat Clubs & Lakes
Recent Updates In Places

|
Stade, Germany
7 hours ago by 🇩🇪 Wolle (
Lieutenant Commander) |
|
|
Model Boating Association of South Africa
27 days ago by 🇿🇦 Rudy-M (
Warrant Officer) |
|
|
BUXTON MODEL BOAT CLUB
1 month ago by 🇬🇧 philcaretaker (
Commodore) |
|
|
Rawdon Model Boat Club
1 month ago by 🇬🇧 MikeC3 (
 Petty Officer 2nd Class) Petty Officer 2nd Class) |
|
|
Sonstraal Dam
2 months ago by 🇿🇦 Rudy-M (
Warrant Officer) |
|
|

Upcoming Events

|
May
5 2024
|
1 Day Only!
|
Edina Model Yacht Club - Spring Breakfast
Ended 3 days ago
|

|
Jun
8 2024
|
1 Day Only!
|
RAWDON MBC OPEN DAY
Starts 1 months time
|
|
|
Jun
9 2024
|
1 Day Only!
|
Edina Model Yacht Club - Parade of Boats at Centennial Lakes Ponds
Starts 1 months time
|
|
|
Aug
11 2024
|
1 Day Only!
|
Edina Model Yacht Club - Lighthouse Night #1
Starts 3 months time
|
|
|
Sep
7 2024
|
1 Day Only!
|
Edina Model Yacht Club - Lighthouse Night #2
Starts 4 months time
|
|
|
Boat Harbour
1 Photo
18 Likes
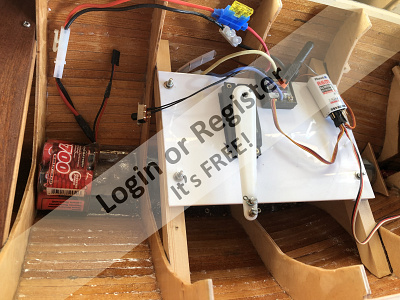
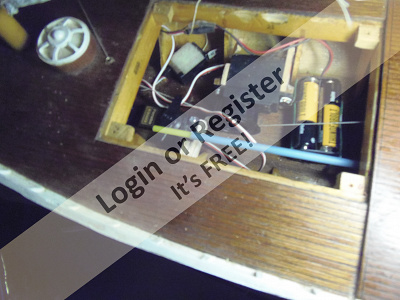
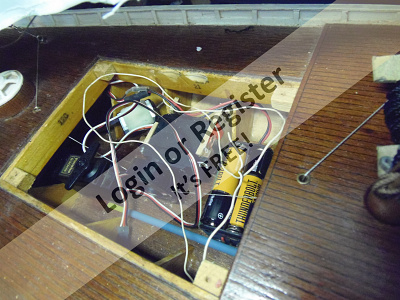
Artesania Latina 20201 Amsterdam
I picked this up from the estate of a young man. As with most of my boats, it is sort of a "rescue". It is basically sound, but somebody before me cut all the wiring out of it.
It is equipped with all the lights the kit is supposed to have, as well as a bow thruster. I have started resoldering all the electrical connections, still working through what kind of wiring harnesses I will need to build for the various light circuits.
Some of the railings, etc. need rebuilding or re-attaching.
It should be a nice boat when finished.
Dave B
🇺🇸 DWBrinkman
1 day ago
6 Attributes
6 Comments
9 Photos
10 Likes
Springer #4 USACOE Stoplog
This is my fourth Springer tug. It was built to resemble the U.S. Army's Corps of Engineers stoplog tug located at Little Goose Dam in Washington State. The scale is about 1/17. The model had to be modified slightly because the length to beam ratio between the real tug and a Springer ae slightly different. This keeps the model within the Springer class rules.
🇺🇸 LewZ
8 days ago
10 Attributes
1 Comment
11 Photos
10 Likes
City of Sheffield
Tyne type lifeboat, moulded hull and deck very strong and light. Front and rear cabins remove over moulded deck combings leaving massive access to spacious hull.
🇬🇧 Rogal118
12 days ago
9 Attributes
5 Comments
4 Photos
19 Likes
Lulonga River Tug
Lulonga steam river tug. Broad beam twin stern paddles. Very stable and graceful on the water. Single motor (12 volt)chain driven from geared motor. Fitted with smoke mister, lights and sound. Unusual model built from plan. Lovely to sail on a summer evening.
🇬🇧 wmbc40
16 days ago
0 Attributes
19 Comments
7 Photos
10 Likes
Oppie
Way back when, there used to be a company producing grp hulls, they were based in Holyhead(?) or nearby, the business was sold, and I discovered they had some pieces for the Oppie, I bought them, constructed the model, sailed it, was impressed, so much so I embarked on the construction of the other exact 1:4 scale models.
🇫🇷 stotty1111
20 days ago
0 Attributes
3 Comments
3 Photos
17 Likes
Graupner Commodore
I acquired this Commodore and made some modifications so she is now a Chris Craft Roamer 37'
🇨🇦 Brightwork
23 days ago
4 Attributes
12 Comments
2 Photos
18 Likes
Billings Smit Nederalnd
I aquired this for free and did some restoration on her. I will probably give her to my brother.
🇨🇦 Brightwork
23 days ago
4 Attributes
9 Comments
5 Photos
13 Likes
1949 40' Chris Craft Challenger
This is based on the Dumas model plans. Model was produced by dumas as a kit in the 50's. I semi scratch built her from the plans.
🇨🇦 Brightwork
23 days ago
8 Attributes
6 Comments
9 Photos
11 Likes
Steam Power
Not strictly marine based, but the Stuart D10 is destined for a 1:12 Customs Launch, Active, built by Cox & Co Falmouth 1912, and stationed at Gravesend until the '30's.
Kit of castings, machined and built by myself along with the horizontal engine.
The others have been bought at knock down prices over the years!
They all need sprucing up!
The boiler was bought several years ago from an Australian outfit, at the time it seemed incredibly cheap, but was probably caused by the exchange rates between the Australian dollar and the pound!
It came complete with lagging, planking and other bits and pieces, cannot be exact as I cannot find the box with the pieces in, cannot remember if it was complete with burner!
I now have the thermal blocks (ex night storage heater) to construct a hearth to continue with the installation etc.
Photos of 'Active' to follow it is stored at the club house!
🇫🇷 stotty1111
29 days ago
0 Attributes
2 Comments
|
|
How-To Articles
Need help trying to find some lights for my USCG MLB 47 foot 1:16 scale
Revised 4 days ago
By bruce1946
Question on Painting order
Revised 11 days ago
By bruce1946
LED – SERIES AND PARALLEL CIRCUITS – FLASHING CIRCUITS - Compendium of information
Revised 1 month ago
By AlessandroSPQR
Transmitter Camera Mount
Revised 2 months ago
By cjanik001
NAVAL PROPELLERS. Compendium of information.
Revised 2 months ago
By AlessandroSPQR
Lipo Battery Reference charts
Revised 2 months ago
By CB90
K.M.Y.C.A. Monthly magazine
Revised 3 months ago
By hermank
CALCULATION OF THE IMMERSED VOLUME (SIMPLE MATHEMATICAL/GEOMETRIC METHOD) OF YOUR MODEL
Revised 5 months ago
By AlessandroSPQR
Basic Model Boat Operations
Revised 5 months ago
By LewZ
Fiberglass boat hull
Revised 6 months ago
By northark
|
|
Login To
Remove Ads
Remove Ads
🛍️ Basket
Main menu transported here on mobile
Login
Create New Account
Trending Topics
Members Online
Forum
Quick snap on coupling
DWBrinkman
3 minutes ago
Forum
Wordle of the Day?
Cashrc
58 minutes ago
Forum
In Loving Memory of my dad Peter, aka Mallory.
jumpugly
1 hour ago
Forum
UK Coastal Forces
Nickthesteam
3 hours ago
Forum
Light at the end of the tunnel?
Peejay
4 hours ago
Blog
More Progress
KevinH
7 hours ago
Place
Stade, Germany
Wolle
7 hours ago
Forum
2nd competition
Razor1955
8 hours ago
Forum
Question of the Day?
Rudy-M
8 hours ago
Blog
Re: About to start the glass fibre
Trident73
9 hours ago
Harbour
Re: Artesania Latina 20201 Amsterdam
DWBrinkman
12 hours ago
Blog
British Power Boat 70ft Motor Gunboat.
grahams
17 hours ago
Forum
Flight Link Control Launch Link 2 channel radio control set
Stuart Mackay
1 day ago
Blog
Re: NQD PX-16
LewZ
1 day ago
Forum
Edina Model Yacht Club Season Opener
AlessandroSPQR
1 day ago
Forum
If only
Razor1955
1 day ago
Blog
Re: CGINGA1V
Len1
2 days ago
Forum
Boat storage complete
Ronald
2 days ago
Blog
Re: MAS 562 update
grahams
2 days ago
Forum
Edine Model Yacht Club 2024 Events
DWBrinkman
2 days ago
Forum
Smoke spaghetti
jbkiwi
2 days ago
Blog
Re: Larger rudder, deck install, more mods
jumpugly
3 days ago
Forum
World Engines/ Ace Commander 6 channel radio
Stuart Mackay
3 days ago
Forum
May the Fourth
KevinH
3 days ago
Harbour
Re: 3. Old Commodore / Graupner
Mike Stoney
3 days ago
Forum
When a model shipbuilder travels the country . . .
Mike Stoney
3 days ago
Forum
Coast Guard 47 MLB 1:16 scale build
bruce1946
3 days ago
Wiki
Need help trying to find some lights for my USCG MLB 47 foot 1:16 scale
bruce1946
4 days ago
DWBrinkman
Lieutenant Commander
2,498 Points
30 seconds ago
Chum444
Midshipman
967 Points
9 minutes ago
MartyH
Recruit
3 Points
10 minutes ago
LaurenceC
Recruit
0 Points
11 minutes ago
BOATSHED
Lieutenant
1,970 Points
24 minutes ago
roycv
Rear Admiral
5,344 Points
25 minutes ago
LeeA
Recruit
0 Points
39 minutes ago
dash8man
Able Seaman
26 Points
46 minutes ago
paulc3
Able Seaman
20 Points
46 minutes ago
bruced
Able Seaman
47 Points
50 minutes ago
Cashrc
Vice Admiral
7,251 Points
58 minutes ago
MikeS1
Able Seaman
21 Points
1 hour ago
RodC
Lieutenant
1,672 Points
1 hour ago
jumpugly
Commander
2,562 Points
1 hour ago
gcladd
Petty Officer 2nd Class
187 Points
2 hours ago
Rowen
Captain
3,481 Points
2 hours ago
jennovids
Recruit
0 Points
2 hours ago
je8031ej
Recruit
0 Points
3 hours ago
melian
Recruit
0 Points
3 hours ago
Peejay
Midshipman
1,090 Points
3 hours ago
Nickthesteam
Commander
2,641 Points
3 hours ago
peterd
Midshipman
1,016 Points
3 hours ago
tj6287
Recruit
0 Points
3 hours ago
Pdj
Recruit
12 Points
3 hours ago
Myford
Recruit
4 Points
3 hours ago
Newby7
Fleet Admiral
10,648 Points
4 hours ago
Rookysailor
Commodore
4,797 Points
4 hours ago
Rudy-M
Warrant Officer
875 Points
4 hours ago
KevinH
Chief Petty Officer 1st Class
597 Points
4 hours ago
bruce1946
Midshipman
957 Points
4 hours ago
Monty6
Recruit
0 Points
4 hours ago
Maurice
Recruit
12 Points
4 hours ago
PhilipS1
Recruit
0 Points
4 hours ago
Hhager2
Midshipman
1,024 Points
5 hours ago
BarryW
Recruit
0 Points
5 hours ago
MervG
Recruit
0 Points
5 hours ago
terrymiff
Master Seaman
104 Points
5 hours ago

Rogal118
Lieutenant Commander
2,466 Points
5 hours ago
ChrisF
Lieutenant Commander
2,181 Points
5 hours ago
RossN
Recruit
2 Points
5 hours ago
DGoss999
Warrant Officer
670 Points
6 hours ago
RNinMunich
Fleet Admiral
35,706 Points
6 hours ago
hermank
Captain
3,386 Points
6 hours ago
andrewandrachelh
Recruit
13 Points
6 hours ago
Razor1955
Leading Seaman
91 Points
6 hours ago
Trident73
Warrant Officer
704 Points
6 hours ago
DaveWhittaker
Recruit
12 Points
6 hours ago
grahammileham
Recruit
4 Points
6 hours ago
Wolle
Lieutenant Commander
2,381 Points
6 hours ago
Len1
Sub-Lieutenant
1,502 Points
6 hours ago
Login To
Remove Ads
Remove Ads
🏠
Home
Home
📰
Trending
Trending
💬
Forum
Forum
🗝
Login / Join
Login / Join
|
Cookies are used for ads personalisation.
By using this website you agree to our use of cookies. More Info |
Main Menu
🚤 Model Boats
• Forum
• Build Blogs
• Media Gallery
• Boat Clubs & Lakes
• Events
• Boat Harbour
• How-To Articles
• Useful Links
This Website
🔍 Search
📝 Guestbook
👨👩👧👦 Members (7,882)
📣 Support
Hobby Supplies
🛍️ Online Shop
Login
🗝 Login
🗝 Create New Account
▼
Media Gallery
X
1 of 4
► |
◄ |
Media Viewer
^
_
X
Share
X
Flag Inappropriate Post
X
| Select Reason | |
| Sexual content Includes graphic sexual activity, nudity, and other sexual content. | |
| Violent or repulsive content Violent or graphic content, or content posted to shock viewers. | |
| Hateful or abusive content Content that promotes hatred against protected groups, abuses vulnerable individuals, or engages in cyberbullying. | |
| Harmful dangerous acts Content that includes acts that may result in physical harm. | |
| Child abuse Content that includes sexual, predatory or abusive communications towards minors. | |
| Promotes terrorism Content intended to recruit for terrorist organisations, incite violence, glorify terrorist attacks, or otherwise promote acts of terrorism. | |
| Spam or misleading Content that is massively posted or otherwise misleading in nature. | |
| Infringes my rights Privacy, copyright and other legal complaints. | |
Basket Updated
X
Loading...
Loading
Loading Uploader...