|||
|
|
🗝 Login
🤖 Create Account
Main Menu
🚤 Model Boats
• Forum
• Build Blogs
• Media Gallery
• Boat Clubs & Lakes
• Events
• Boat Harbour
• How-To Articles
• Plans & Docs
• Useful Links
This Website
🔍 Search
📝 Guestbook
👨👩👧👦 Members (7,852)
📖 Quick Site Guide
📣 Support
👥 Membership
Hobby Supplies
🛍️ Online Shop
Not Registered
Go AD FREE & get your membership medal
BRONZE
Less Ads
SILVER
GOLD
Ad Free
Cancel
Anytime
Anytime
£2.50
£4.50
£6.50
Subscribe
Go AD FREE & get your membership medal
BRONZE
Less Ads
SILVER
GOLD
Ad Free
For A Whole Year!
£25
£45
£65
Donate
You Will Be Helping Towards:
Domain Fees
Security Certificates
iOS & Android App Fees
Website Hosting
Fast Servers
Data Backups
Upkeep & Maintenance
Administration Costs
Without your support the website wouldn't be what it is today.
Please consider donating towards these fees to help keep us afloat.
Read more
All donations are securely managed through PayPal.
Many thanks for your kind support
Without your support the website wouldn't be what it is today.
Please consider donating towards these fees to help keep us afloat.
Read more
All donations are securely managed through PayPal.
Many thanks for your kind support
Join Us On Social Media!

|

|

|
Download The App!
Login To
Remove Ads
Remove Ads
Login To
Remove Ads
Remove Ads
🏝️ About This Website
☝️ Terms of Service
🔏 Privacy Policy
Model Boats Website
Model Boats Website
Home
Forum
Build Blogs
Media Gallery
Boat Clubs & Lakes
Events
Boat Harbour
How-To Articles
Plans & Docs
Useful Links
Welcome to the Model Boats Website! A place for all model boaters!
Feel free to browse through the website, ask your questions, upload your photos or even start your own blog!
Feel free to browse through the website, ask your questions, upload your photos or even start your own blog!
Login To
Remove Ads
Remove Ads
Today's Question
What does the acronym "PFD" stand for in boating terminology?
ANSWER >>
>
Today's Wordle
7 LETTERS
>
Trending Now
Harbour
Re: Dart Belle Paddle Steamer.
Nice and different approach to a paddle wheeler.
Len
🇺🇸 Len1
43 minutes ago
Harbour
Re: City of Sheffield
Well done. Love the details and you showing some of the construction pictures.
Len
🇺🇸 Len1
51 minutes ago
Harbour
Re: HMS Belfast C35 Graupner Refit Purchase.
In the second photo it's incredible, it seems real; only the water betrays him.
🇮🇹 AlessandroSPQR

1 hour ago
Forum
Question of the Day?
Do water wings qualify as a PFD?
I was taught that a protective firearm device was anything with more firepower than the opposition
🇬🇧 EdW
3 hours ago
Forum
Wordle of the Day?
So now I know. This thing takes the words you didnt get in the first row and recycles it. Oh my frigate!!
🇿🇦 Rudy-M

3 hours ago
Harbour
Re: HMS Bluebell.
I bought the 1/72 kit while on vacation last summer, saw it on Facebook Marketplace for $40 CDN. The owner had it for years and was tired of taking the kit with him, when the moved he from apartment to apartment. It had been a gift from his grandmother, she knew he like to build plastic models but didn’t know he was a model plane builder.
Well to my good fortune I build planes, vehicles and floating objects too.
Now before I close this off, it is my intention to build it as a post war vessel. Some of these went on to serve in other capacities for many years in peace time roles. Yes I know they have a distinguished role in history which most model builders will try to simulate, but there is the pre-war whaling role, and the post-war roles these ships preformed too.
http://www.cbrnp.com/RNP/Flower/MODELS/Sudbury/Sudbury.htm
Survey Vessel (ALC 113/AGOR 113)
🇨🇦 Ronald

4 hours ago
Forum
THE STORY OF THE NZ HAMILTON JET
Just found this great video on the history of the Hamilton jet. A friend of mine had one of the later Hamilton jet boats with the Chevrolet V8 which was a great boat,- lots of power. Also saw Jetmark (mentioned in the vid) racing in powerboat races in the 70s on the Auckland harbour. From an idea in the back blocks of the South Island of NZ, to being used all over the world was an amazing achievement.
My 20 ft Hartley cabin boat (1979) was designed for a Hamilton single stage jet, but I changed it to a NZ built stern drive similar to a Melhop designed unit (Melhop was mentioned in the vid.) Melhop made a stern drive with a forward facing propellor and 360deg steering ( think I still have a sales brochure from them in the 70s). Some interesting boat stuff in the early days. Probably 90% outboards these days in boats under 25ft.
I built My Hartley model to represent my original boat with a jet. Most of the boat designers in NZ in the 60s and 70s offered designs to use either Hamilton jets, V-drives, direct drives or outboards.
https://www.youtube.com/watch?v=CQ3W0RBcm38
JB
🇳🇿 jbkiwi

4 hours ago
Forum
Calling it a day.
Dear All.
I am lost for words for all your kind and caring comments.Thank You!!
Just shows the great spirit of our site
I too hope the Dr’s have got it wrong!!
Kind regards
Bill
🇬🇧 Scratchbuilder

5 hours ago
Gallery
Re: INGA IV
You guys really know how to rub it in, What with various problems I am hours and hours from finishing my model which originated from the Inga. I am currently decking, sail making as well as all of the many jobs needing completion before a hoped for launch date.
I hope to post some photos soon meanwhile I hope that you both enjoy a session of fair wind sailing as well as calm.
All the very best ChrisG
🇬🇧 ChrisG

7 hours ago
Forum
Dating ?????
No worries, it's the madness of the internet. I complained out loud about my old clogs, and my hair falling out and low and behold my computer became crowded with Birkenstock advertisements, and men's hair club commercials. Dammit!
🇺🇸 jumpugly
16 hours ago
Forum
THE MOST ORIGINAL, STRANGE AND FAILURE SHIPS EVER BUILT IN THE WORLD.
Thanks Alessandro , I'll certainly post some photos when completed, "before and after ". The existing boat shed is now too small. My stepson was in the process of moving rental accommodation recently and wondered if I could make use of some timber. Duly delivered, I was wondering what I could do with it all, a quick measure by hand ️ and realised that I could potentially now bridge the gap between house and garage hence another "home project "to finally cross of the list. Maybe one day...
🇬🇧 Doogle
18 hours ago
Harbour
Re: Graupner Commodore
Elegant boat.
I really like the name "Centurion".
All that remains is to admire the RC navigation.
🇮🇹 AlessandroSPQR
24 hours ago
Blog
Re: Ballast Question
More than right, Jock.
I look forward to enjoying the developments of ESSO Deutschland.
🇮🇹 AlessandroSPQR
1 day ago
Harbour
Re: Lulonga River Tug
Hello Tim, my boat uses one geared motor linked to the paddle wheels via a chain drive. Steering is very effective by making a clip on rudder extension. The driven paddle wheels are very effective at driving the boat. Be a shame to have paddles that just freewheel although I have seen this done on another model. My paddles sit just deepening to bite into the water. It also reverses quite well, much to my surprise! My hull does have shallow keel strips about 8 mm running fore to aft. Hope this helps. Tony
🇬🇧 wmbc40

1 day ago
Forum
Vertical boiler identification
Yea really sorry i missed this one. I have a Midwest fantail launch that I lengthened by 8 inches amidships and this would have been perfect for it. This body of this one was 3" diameter and 7" tall.
Hoping someone here has an idea who made this one or possibly has one or one similar they might be interested in selling.
🇺🇸 algon

1 day ago
Forum
Looking for help identifying....
Looking for help identifying this vertical boiler. It was listed on ebay over the weekend and I missed bidding on it. Is this an early PM Research vertical boiler? If anyone knows or maybe has one like it for sale I am interested.
🇺🇸 algon
2 days ago
|

New Member
Australia
 RichardM2
RichardM211 hours ago
New Member
United Kingdom
KevinM20 hours ago
New Member
United Kingdom
RobertH1 day ago
New Promotion
Chief Petty Officer 2nd Class
 tim morland
tim morland2 days ago
New Member
United States
sjk2 days ago
New Member
Canada
SteveS12 days ago
New Member
United States
DavidF13 days ago
New Member
Belgium
janc3 days ago
New Member
United Kingdom
WilliamS13 days ago
New Member
United Kingdom
AlanS33 days ago
New Member
United Kingdom
FredE13 days ago
New Promotion
Leading Seaman
wmbc404 days ago
New Member
United Kingdom
TommyT14 days ago
New Member
United Kingdom
KenC14 days ago
New Member
United Kingdom
KenV4 days ago
New Member
Australia
Pdjones4 days ago
New Member
United Kingdom
malcolmr14 days ago
New Member
Australia
PhillipH5 days ago
New Member
United Kingdom
JaneA5 days ago
New Member
Turkey
MehmetAliB5 days ago
New Member
Australia
GeoffA15 days ago
Birthday This Week
Turns 70
RossM6 days ago
Birthday This Week
Turns 46
 Schmango
Schmango6 days ago
New Member
United States
CJ6 days ago
New Member
Slovakia
RomanS6 days ago
New Member
United Kingdom
TonyF16 days ago
New Member
United States
Colin B Waitt6 days ago
New Member
United States
fbcmhall6 days ago
Birthday This Week
Turns 77
Lauriem7 days ago
New Member
United Kingdom
JollyRoger7 days ago
New Member
United Kingdom
PhilipP7 days ago
New Member
United Kingdom
michaeld17 days ago
New Member
Switzerland
maran497 days ago
New Member
United Kingdom
jacks8 days ago
New Member
United Kingdom
georgeC29 days ago
New Member
United Kingdom
JohnJ110 days ago
New Member
United Kingdom
Geoffreym110 days ago
New Member
Spain
JosLuisB10 days ago
New Promotion
Midshipman
EdW11 days ago
New Member
Argentina
MatiasO11 days ago
New Member
United Kingdom
BridgetH11 days ago
New Member
United Kingdom
Jim111 days ago
New Member
United States
DanO11 days ago
New Promotion
Able Seaman
 Steves-s
Steves-s12 days ago
New Promotion
Captain
 Brightwork
Brightwork12 days ago
Birthday This Week
Turns 67
Stephen T13 days ago
Birthday This Week
Turns 79
Robert 8713 days ago
New Member
Germany
UlfF13 days ago
See More
Forum Topics
Question of the Day?
Do water wings qualify as a PFD?
I was taught that a protective firearm device was anything with more firepower than the opposition
3 hours ago by 🇬🇧 EdW ( Midshipman)
Midshipman)
Website Related
2403 Posts
6118 Likes
6118 Likes
Started
1 year ago
by fireboat
1 year ago
by fireboat
Latest
3 hours ago
by EdW
3 hours ago
by EdW
Wordle of the Day?
So now I know. This thing takes the words you didnt get in the first row and recycles it. Oh my frigate!!
3 hours ago by 🇿🇦 Rudy-M ( Warrant Officer)
Warrant Officer)
Website Related
1293 Posts
2646 Likes
2646 Likes
Started
10 months ago
by fireboat
10 months ago
by fireboat
Latest
3 hours ago
by Rudy-M
3 hours ago
by Rudy-M
THE STORY OF THE NZ HAMILTON JET
Just found this great video on the history of the Hamilton jet. A friend of mine had one of the later Hamilton jet boats with the Chevrolet V8 which was a great boat,- lots of power. Also saw Jetmark (mentioned in the vid) racing in powerboat races in the 70s on the Auckland harbour. From an idea in the back blocks of the South Island of NZ, to being used all over the world was an amazing achievement.
My 20 ft Hartley cabin boat (1979) was designed for a Hamilton single stage jet, but I changed it to a NZ built stern drive similar to a Melhop designed unit (Melhop was mentioned in the vid.) Melhop made a stern drive with a forward facing propellor and 360deg steering ( think I still have a sales brochure from them in the 70s). Some interesting boat stuff in the early days. Probably 90% outboards these days in boats under 25ft.
I built My Hartley model to represent my original boat with a jet. Most of the boat designers in NZ in the 60s and 70s offered designs to use either Hamilton jets, V-drives, direct drives or outboards.
https://www.youtube.com/watch?v=CQ3W0RBcm38
JB
4 hours ago by 🇳🇿 jbkiwi ( Fleet Admiral)
Fleet Admiral)
Hobby Chit Chat
1 Post
2 Likes
2 Likes
Started
4 hours ago
by jbkiwi
4 hours ago
by jbkiwi
No Replies Yet
Calling it a day.
Dear All.
I am lost for words for all your kind and caring comments.Thank You!!
Just shows the great spirit of our site
I too hope the Dr’s have got it wrong!!
Kind regards
Bill👍👍
5 hours ago by 🇬🇧 Scratchbuilder ( Vice Admiral)
Vice Admiral)
Hobby Chit Chat
26 Posts
315 Likes
315 Likes
Started
3 days ago
by Scratchbuilder
3 days ago
by Scratchbuilder
Latest
5 hours ago
by Scratchbuilder
5 hours ago
by Scratchbuilder
Dating ?????
No worries, it's the madness of the internet. I complained out loud about my old clogs, and my hair falling out and low and behold my computer became crowded with Birkenstock advertisements, and men's hair club commercials. Dammit!
😉😂
16 hours ago by 🇺🇸 jumpugly ( Lieutenant Commander)
Lieutenant Commander)
Non-Hobby Chat
4 Posts
21 Likes
21 Likes
Started
21 hours ago
by Wolle
21 hours ago
by Wolle
Latest
16 hours ago
by jumpugly
16 hours ago
by jumpugly
|
|
Login To
Remove Ads
Remove Ads
Build Blogs
6 Posts
9 Followers
48 Likes
Scratchbuilt Esso Deutschland 1:150
When I first posted a thread under ... a dreamproject.. I didn't realize it was the wrong forum category. So here is my built blog. I will spare you the original introduction as I have made progress which and most of you are already familiar with my project.
The hull was built merging 2 methods on a simple keel plate from plywood, bow and stern structure bread and butter and hull in between 3mm planks on frame.
The entire main deck is intended to be removable with a drainage irrigation system of plastic corner moulding (from a building supplier) along top of hull and flush at poop and back deck structure. The deck is made of 1/4" plywood skeletal structure incorporating midship deckhouse. Hull glassed with lightest cloth available after 2 coats 2-epoxy sealer and paint primer followed by final coat except top (above waterline) grey will be applied once I have finished doing any necessary adjustments. There have been a lot of them since I realized many inaccuracies in dims etc. I wasn't happy with.
Here are photos in the progress (some may have already been posted in the original post.
More a bit later next week.
🇨🇦 JockScott
2 days ago















86 Posts
25 Followers
621 Likes
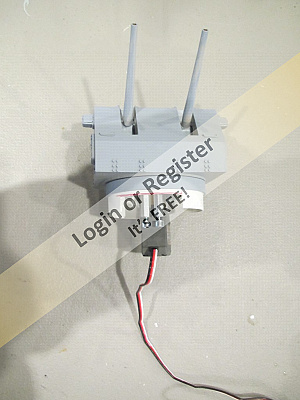
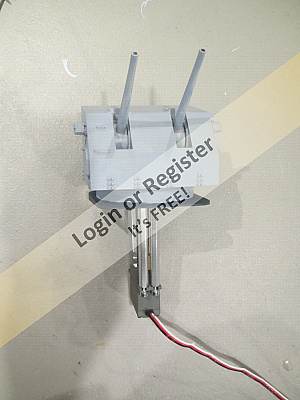
Russian K100D waterjet work boat project
Just having a play with an idea for a model of a early Russian KS 100D general purpose work boat. These were used for river work towing logs etc in shallow rivers . The water jet is unusual, as it has a rear shute with twin rudder type deflectors, and rear hull side ports for reverse (independent controls for each port). Someone on the site mentioned a steam powered water pump driven ship from the 1800s ? a while back on the site which used a similar principal.
The boats were made by the Yaroslavl shipyard, and were very common in the late 50s till (I think) the 70s. Not much info on them but a few guys have rebuilt old ones for pleasure boats. They have a speed of around 16-18knts and used a Yamz 170hp V8 diesel. I've contacted (YT) a guy who has rebuilt one of these boats, and he has fitted the V6 version of this engine.
My attempt is not like the original, as there is no info on the complicated internal deflector system, so I've gone with the next best thing using modified electrical conduit fittings with flap valves. Seems to work ok, but not sealed yet so leaks like a sieve. I'd use a 26mm jet unit for the pump in front of the unit. I'll have to reduce the diameter of the side outlets to get more force behind the jets. Might have to fit the unit in a waterproof tray with a bilge pump. as I think, even though it will be sealed, it will still leak slightly round the 3 shafts.
https://youtu.be/7Lgb7hH6ln8
https://www.youtube.com/watch?v=altwiMdZlIA
https://www.youtube.com/watch?v=yWSI8moMeZg&t=33s
https://www.youtube.com/watch?v=87PsJVdPNhE
https://www.youtube.com/watch?v=CQ3U7XmeG1A (similar later model showing manoeuvrability)
https://www.youtube.com/watch?v=hblw4_44FB8
The big lid on the jet is for clearing weed or similar which might get into the unit.
🇳🇿 jbkiwi
3 days ago
















2 Posts
3 Followers
14 Likes
52' Motor Lifeboat Victory
One of my nine-year projects is coming to an end. I am sad to see it completed in some ways, overjoyed in others. Many projects have been begun and shelved over those nine years; some are in the trash now.
What is known is the 213' WMEC-168 Yocona is hit or miss whether my attempts to waterproof a static hull will be successful. So on hold or a side project.
The Gunboat Philadelphia is on-going at work between shifts.
PBY that doesn't Fly I will place on hold, pending possible actual flight. (That will put three aircraft inline to be completed.)
The battleship North Carolina....Big. Not so complex as physically large undertaking.
SO, begin at the beginning as I tell my students. I pondered purchasing the laser-cut kit from Canada, but it is just frames, deck, and pilothouse. Yes, it is 1" to one foot scale, and would match my 44' MLB perfectly, but $286 plus shipping? For me too much, I will build at 1/24th scale for now. Small enough to store, big enough to detail and outfit with running gear.
My 44 MLB, is a leaky, but I am installing an automatic bilge pump. I get so much joy out of running it, and I will have the tri-fecta of MLB's 36', 44', and 52'. The 213 should be complete around the time I finish, so four CG projects in a years time, plus the Philly is a quick build. So, it is a year, year and a half plan.
This will be a slow one.
Non Boat picture is project that is almost complete.
Kevin
🇺🇸 KevinH

6 days ago


53 Posts
16 Followers
258 Likes
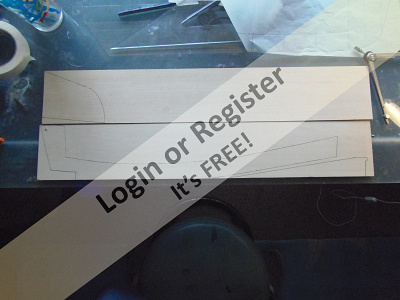
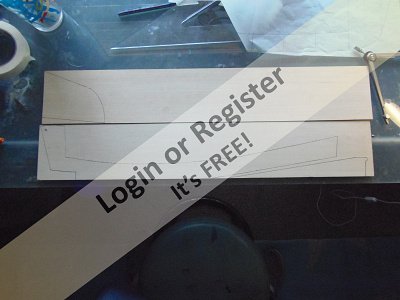
BLUENOSE
Started 2020 with plans by P F Eisnor from Nova Scotia
34 pairs of ribs
🇨🇦 RossM
6 days ago









4 Posts
11 Followers
39 Likes
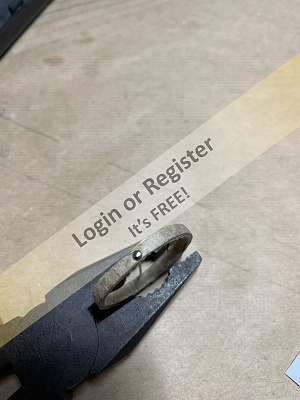
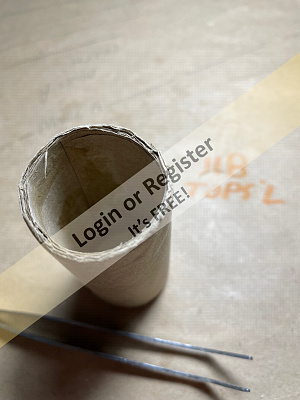
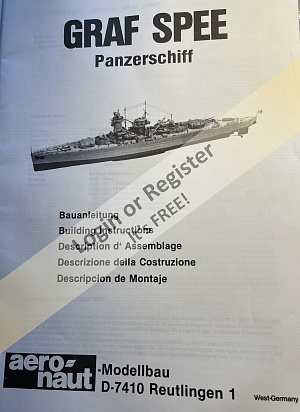
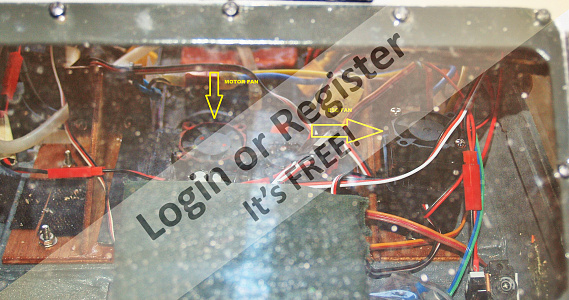
Aeronaut Graf Spee
I bought this kit about 10 years ago from a German model shop. It is definitely old-school, with great detailed plans, detailed stock list, but no instructions beyond a couple of paragraphs. I have not built a model in 20 years but was very active in my youth 50 years ago. I find that my skills have deteriorated and this will not be a great build, but it is enjoyable solving the problems and figuring out how to build this thing.
It has a plastic hull, a very nice plastic fitting set, but the rest of the kit is wood, with many pieces which have to be cut from printed sheets. Luckily, I have access to a wood shop with jigsaw and sanders.
I have fitted out the hull, added the motors, and started the superstructure. Stay tuned for further progress, I hope.
🇨🇦 whittonm
7 days ago





25 Posts
19 Followers
185 Likes
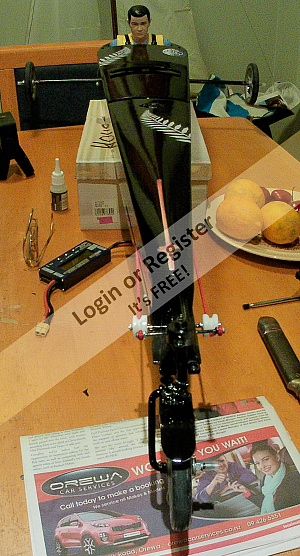
THE AMPHITRUCK
Decided to do something other than a boat this time, but still with a nautical purpose,- a 6 wheel twin diff twin prop swimming truck. Been done before, but I thought I'd have a go at one of my own design. Drew up some side and end templates and made a start, Purchased all the mechanical bits, (diffs, front axle, prop shafts, props, ESC, wheels,) over a few months from uncle ALI and added them to stuff I had in my collection.
Using cheap 3mm packing ply, I made the floor base ( to suit the diff and front axle widths) and strengthened it with 10x10 ally angle. Next,-cut out the sides and front and back panels. The floor was scored at the front and back to allow it to be bent up to the sides for gluing. Holes were cut in the floor to allow the diff heads to protrude through.
I had to modify the front axle to suit the width of the diffs by adding in an ally angle center section. Also had a play with setting the diffs and drive-shafts up with universals. Drive motor is a 380 1500 RPM @ 12v geared reduction drive, which is the one I first used in my Jeep tow wagon for my Hartley, (replaced it with a 1000 RPM version for more torque) and uses a 3s LiPo and Quicrun 40A ESC.
🇳🇿 jbkiwi
7 days ago


















3 Posts
8 Followers
45 Likes
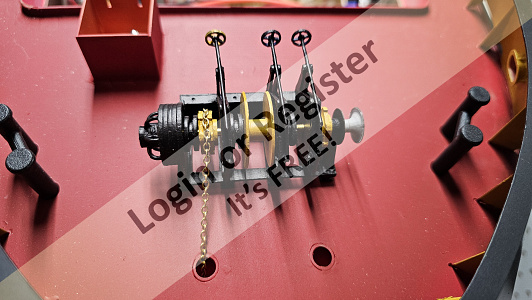
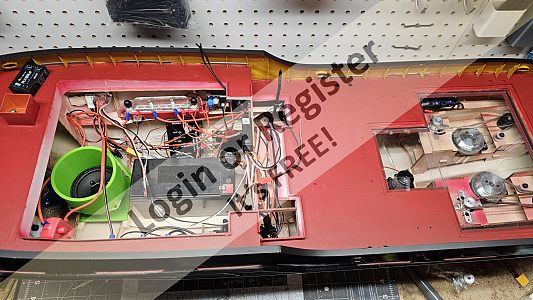
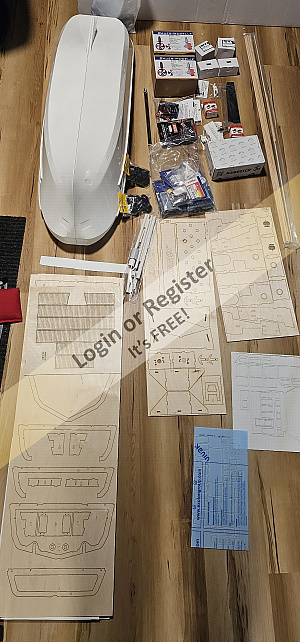
Aeronaut Jonny
Hi all, I started a new build during Christmas and I'm just about ready to start painting the haul so I figured its a good time to get the build log going.
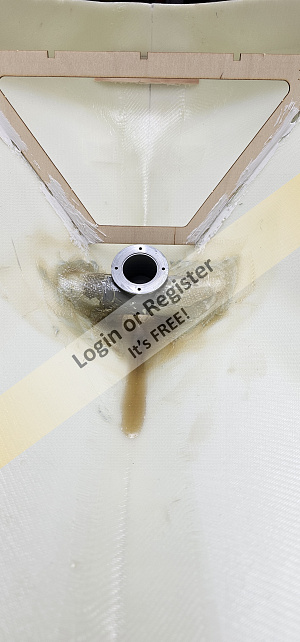
I've had this kit for about a year now, purchased from Bauer in Germany along with with the recommended equipment including their Schottel Drive system. The plan is to have the two Schottel drives, a bow thruster, one working Anchor (possibly two in the future of off the same winch), a sound system, two working radars, working spot light with pivot in pitch and yaw, always on nav lights and interior lights, RC working main winch and manually operated bow and side winches, tow separate working fire monitors able to rotate individually, possibly a smoke generator and final an auto bilge system This comes to a total of 18 RC, unfortunately I only have 16 available so we will have to see what ends up in the ship.
So far I have the drives and bow thruster all fit and ready for assembly. I then built up the frame work and made the holes for the fire pumps and bilge. then had to build the lower deck house so I could fit the deck in the right place on the ship. Once the deck was dry fit I cut the scuppers then glued the deck down. I then set to work making the deck splash proof by installing and extending the kits coaming. I also add a drop floor under the aft hatch that I'm hoping will allow me to keep the water that gets on the deck from leaking down into the haul. Now I've got the Bulwark stanchions and handrails just about complete. I also started work on some of the deck items as I need the locations to work out some of the modifications I'm working through.
I hope to start painting the haul soon, I'm going to try brush painting this ship as I was able to find some nice paints at an Art supply store and I don't have much access to a place to spray paint in the winter. I do think I will spray on the primer first and hope it helps absorbed some of the brush marks.
🇨🇦 Westwind
8 days ago














56 Posts
16 Followers
344 Likes
Constellation
Made the framed glass portion of the skylight. They're hinged so I can get a finger inside to flip the power switch on or off.
They're made from clear plastic from some packaging, basswood, and brass wire.
🇺🇸 Jerry Todd
12 days ago















9 Posts
19 Followers
120 Likes
1949 40' Chris Craft Challenger
Hello all.... I have started a new project!! progress so far... she will be 32 " LOA and twin screw.
🇨🇦 Brightwork
12 days ago
















29 Posts
19 Followers
370 Likes
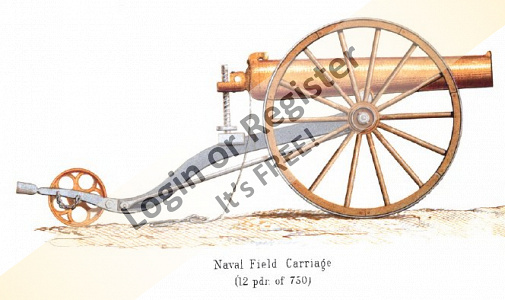
Ship of the desert ? new project
Started the latest project. Spotted these nice 105mm rubber tyred wheels in the big hardware store, and thought they deserved having something to be attached to,- hence the new project.
Scratch building using my 'cut it and see' method Started with a 20x20mm ally angle frame (main V from one piece angle cut and bent with bent and bolted rear cross bar) Rear axle is 10x1mm ally tube, with stub axles (from 10mm bright steel) turned down to fit inside and turned down for a 6mm securing Nyloc nut, and a rear shoulder for the wheels.
Stub axles and tube are drilled through 3mm and secured with 3mm machine screws.
Front axle is 6mm rod from an old sponge mop, and is bent and angled for a bit of reverse castor. 50x3mm ally strip added to the front of the frame for reinforcing and to mount 'stuff' to. The front steering head bush is 10mm bright steel drilled 6mm to be attached to?
Tune in next time for another thrilling instalment
JB
🇳🇿 jbkiwi
12 days ago


















1 Post
5 Followers
3 Likes
To switch or not to switch ?
I wrongly entered my last post in the 'how to' section where, it seems, you are unable to respond. So here is my query for which I am seeking your guidance.
I have a motor circuit that comprises : 5S 5000mAh 30C Lipo; 40A fuse; 90A marine ESC; 3 x 20A fuses; 46 x 50 870KV brushless motor. There are no switches in the circuit yet.
1.Should I have a switch serving the battery ?
2. If yes, what rating ?
3. Should I have a switch between the ESC and the receiver ?
Any advice or guidance gratefully received.
🇬🇧 flaxbybuck
12 days ago

37 Posts
21 Followers
249 Likes
A new build
I will, most likely, have to rename this Blog, at some point.
In the mean time...please do not expect much for a while as she is in her very early stages.
First a disclosure: This hull was built for me by another gentleman. It was delivered in a not quite completed state. Therefore I have spent the last two month working on it to get to it's present state.
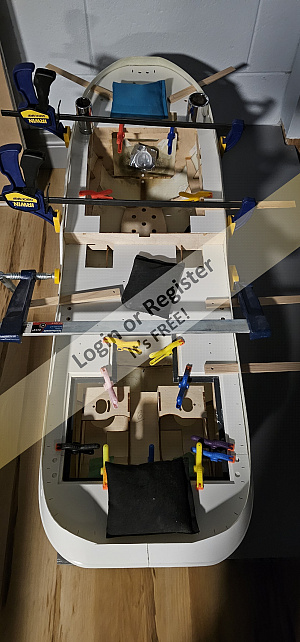
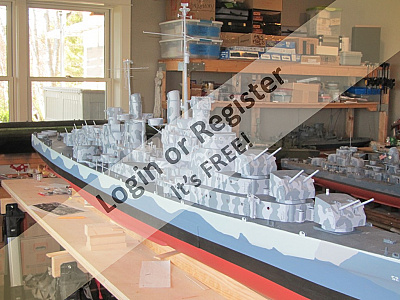
So.. what is it? She is one of four ships in a class that was later enlarged to around eight maybe ten members of the class. Her main armament was eight 5"/38 caliber twin turrets. She and her class namesake sister were both lost during the Naval Battle of Guadalcanal. This ship is most noted due to the loss of an entire generation of one family, five brothers.
This should be enough for identification.
She is being built in my preferred scale, 1/48th or 1/4"=1'.
This ship was used for numerous camouflage scheme experiments and, sadly, there is little definitive documentation to pinpoint her second to last and last schemes carried. That said, my plan, subject to change without notice or reason, is to present her as she appeared following her New York Navy Yard overhaul, or perhaps as she may have appeared after repainting in Placentia Bay NewFoundland, 1942.
She measures out to 11' 3" and her power plant is to be two 24 volt Buehler motors.
Pictures of her and the build to follow.
Wish me luck please, she will not fit in my van....
🇺🇸 ToraDog
13 days ago















|
|
Media Gallery
INGA IV
7 days ago by philcaretaker
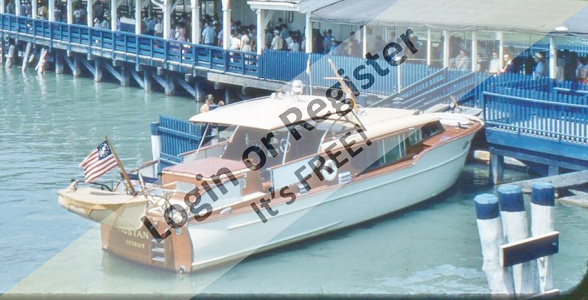
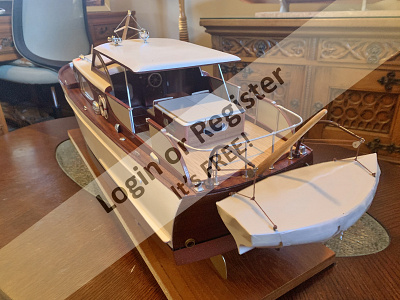
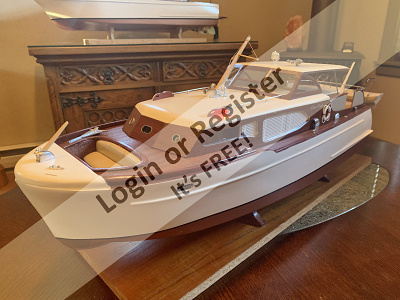
Lake Union Dreamboat
10 days ago by Brightwork
1958/9 50/55' Chris Craft Constellation
11 days ago by Brightwork
Filming "Dinghy Dan"
22 days ago by philcaretaker
"Dinghy Dan"
22 days ago by philcaretaker
"Dan, Dan the Dinghy Man"
25 days ago by philcaretaker
"Dinghy Dan"
26 days ago by philcaretaker
RNLI Severn Class
27 days ago by Rudy-M
Onboard a Focus 2 RC yacht
27 days ago by Rudy-M
Andy sails Topaz with df65's
27 days ago by MartinH2
RC Shark vs Orca?
29 days ago by Rudy-M
Topaz 60" J class yacht
1 month ago by MartinH2
|
|

Login To
Remove Ads
Remove Ads
Boat Clubs & Lakes
Recent Updates In Places

|
Model Boating Association of South Africa
16 days ago by 🇿🇦 Rudy-M (
Warrant Officer) |
|
|
BUXTON MODEL BOAT CLUB
25 days ago by 🇬🇧 philcaretaker (
Commodore) |
|
|
Rawdon Model Boat Club
26 days ago by 🇬🇧 MikeC3 (
Petty Officer 2nd Class) |
|
|
Sonstraal Dam
1 month ago by 🇿🇦 Rudy-M (
Warrant Officer) |
|
|
Cape Town Scale Model Boat Club
1 month ago by 🇧🇪 hermank (
Captain) |
|
|

Upcoming Events

|
May
5 2024
|
1 Day Only!
|
Edina Model Yacht Club - Spring Breakfast
Starts 8 days time
|
|
|
Jun
8 2024
|
1 Day Only!
|
RAWDON MBC OPEN DAY
Starts 1 months time
|
|
|
Jun
9 2024
|
1 Day Only!
|
Edina Model Yacht Club - Parade of Boats at Centennial Lakes Ponds
Starts 1 months time
|
|
|
Aug
11 2024
|
1 Day Only!
|
Edina Model Yacht Club - Lighthouse Night #1
Starts 4 months time
|
|
|
Sep
7 2024
|
1 Day Only!
|
Edina Model Yacht Club - Lighthouse Night #2
Starts 4 months time
|
|
|
Boat Harbour
11 Photos
9 Likes
City of Sheffield
Tyne type lifeboat, moulded hull and deck very strong and light. Front and rear cabins remove over moulded deck combings leaving massive access to spacious hull.
🇬🇧 Rogal118
8 hours ago
9 Attributes
4 Comments
4 Photos
19 Likes
Lulonga River Tug
Lulonga steam river tug. Broad beam twin stern paddles. Very stable and graceful on the water. Single motor (12 volt)chain driven from geared motor. Fitted with smoke mister, lights and sound. Unusual model built from plan. Lovely to sail on a summer evening.
🇬🇧 wmbc40
4 days ago
0 Attributes
19 Comments
7 Photos
10 Likes
Oppie
Way back when, there used to be a company producing grp hulls, they were based in Holyhead(?) or nearby, the business was sold, and I discovered they had some pieces for the Oppie, I bought them, constructed the model, sailed it, was impressed, so much so I embarked on the construction of the other exact 1:4 scale models.
🇫🇷 stotty1111
8 days ago
0 Attributes
3 Comments
3 Photos
17 Likes
Graupner Commodore
I acquired this Commodore and made some modifications so she is now a Chris Craft Roamer 37'
🇨🇦 Brightwork
11 days ago
4 Attributes
12 Comments
2 Photos
18 Likes
Billings Smit Nederalnd
I aquired this for free and did some restoration on her. I will probably give her to my brother.
🇨🇦 Brightwork
11 days ago
4 Attributes
9 Comments
5 Photos
12 Likes
1949 40' Chris Craft Challenger
This is based on the Dumas model plans. Model was produced by dumas as a kit in the 50's. I semi scratch built her from the plans.
🇨🇦 Brightwork
11 days ago
8 Attributes
5 Comments
9 Photos
11 Likes
Steam Power
Not strictly marine based, but the Stuart D10 is destined for a 1:12 Customs Launch, Active, built by Cox & Co Falmouth 1912, and stationed at Gravesend until the '30's.
Kit of castings, machined and built by myself along with the horizontal engine.
The others have been bought at knock down prices over the years!
They all need sprucing up!
The boiler was bought several years ago from an Australian outfit, at the time it seemed incredibly cheap, but was probably caused by the exchange rates between the Australian dollar and the pound!
It came complete with lagging, planking and other bits and pieces, cannot be exact as I cannot find the box with the pieces in, cannot remember if it was complete with burner!
I now have the thermal blocks (ex night storage heater) to construct a hearth to continue with the installation etc.
Photos of 'Active' to follow it is stored at the club house!
🇫🇷 stotty1111
18 days ago
0 Attributes
2 Comments
9 Photos
22 Likes
Oystercatcher
Here we have Oystercatcher, another product of the noughties.
The full size boat is designed for inland waters, weekend cruising, it can be used as a floating tent using the spars and sails.
Designed by Conrad Natzio of East Anglia, it is designed for garage construction, using 6 sheets of marine ply or even water resistant ply.
I met Conrad at an exhibition at Alexandra Palace, had a chat with him was given plans of several of his designs, chose to build Oystercatcher, kept in touch and was invited to a weekend expo at Beale Park, adjacent to the Thames, he used my model on his stand, a very nice man!
The model is an exact scale of 1:4, I enjoyed the build, but the control was not an easy installation, the boat being so open.
Went on to sail her at an exhibition held in Swansea at the Maritime Museum, they had a pond there so was able to try sailing, it worked well, but I felt I needed to add a keel to bring a little more stability, but house moves etc got in the way.
Makes a nice static model!
I will endeavour to get more photos when the wind is calmer!
🇫🇷 stotty1111
21 days ago
0 Attributes
6 Comments
2 Photos
11 Likes
Mini Submarine
Another toy, courtesy of Amazon 7 or 8 years ago.
I bought the beast for about £12 / 15€. It was on offer!
I use it at model exhibitions where there is a pool.
The sub is about 15cm/6" in length, complete with basic r/c system.
It will sail forwards and reverse, turns to the right and left courtesy of water jets, and by use of 2 buttons on the top corners will submerge and resurface. It has rechargeable batteries inside, these are recharged by use of a fly lead from the tx!
The main users are children and sometimes adults who want to have a go!
It generates lots of interest, so much so that sometimes children join the club and go on to build small freelance fishing boats - the majority of models are fishing and military boats, we have the Brest naval base close by and several fishing ports.
🇫🇷 stotty1111
23 days ago
0 Attributes
6 Comments
|
|
How-To Articles
LED – SERIES AND PARALLEL CIRCUITS – FLASHING CIRCUITS - Compendium of information
Revised 21 days ago
By AlessandroSPQR
Transmitter Camera Mount
Revised 1 month ago
By cjanik001
NAVAL PROPELLERS. Compendium of information.
Revised 2 months ago
By AlessandroSPQR
Lipo Battery Reference charts
Revised 2 months ago
By CB90
K.M.Y.C.A. Monthly magazine
Revised 3 months ago
By hermank
CALCULATION OF THE IMMERSED VOLUME (SIMPLE MATHEMATICAL/GEOMETRIC METHOD) OF YOUR MODEL
Revised 4 months ago
By AlessandroSPQR
Basic Model Boat Operations
Revised 5 months ago
By LewZ
Fiberglass boat hull
Revised 6 months ago
By northark
Bending Small Diameter Copper Tubing
Revised 6 months ago
By LewZ
Goodbye summer
Revised 6 months ago
By hermank
|
|
Login To
Remove Ads
Remove Ads
🛍️ Basket
Main menu transported here on mobile
Login
Create New Account
Trending Topics
Members Online
Harbour
Re: Dart Belle Paddle Steamer.
Len1
43 minutes ago
Harbour
Re: City of Sheffield
Len1
51 minutes ago
Harbour
Re: HMS Belfast C35 Graupner Refit Purchase.
AlessandroSPQR
1 hour ago
Forum
Question of the Day?
EdW
3 hours ago
Forum
Wordle of the Day?
Rudy-M
3 hours ago
Harbour
Re: HMS Bluebell.
Ronald
4 hours ago
Forum
THE STORY OF THE NZ HAMILTON JET
jbkiwi
4 hours ago
Forum
Calling it a day.
Scratchbuilder
5 hours ago
Gallery
Re: INGA IV
ChrisG
7 hours ago
Forum
Dating ?????
jumpugly
16 hours ago
Forum
THE MOST ORIGINAL, STRANGE AND FAILURE SHIPS EVER BUILT IN THE WORLD.
Doogle
18 hours ago
Harbour
Re: Graupner Commodore
AlessandroSPQR
24 hours ago
Blog
Re: Ballast Question
AlessandroSPQR
1 day ago
Harbour
Re: Lulonga River Tug
wmbc40
1 day ago
Forum
Vertical boiler identification
algon
1 day ago
Forum
Looking for help identifying....
algon
2 days ago
Forum
Aerokits pt boat bulkhead plans wanted
ChrisF
2 days ago
Blog
Re: Russian K100D waterjet work boat
jbkiwi
2 days ago
Forum
I miss Graupner!!! And Robbe too.
roycv
2 days ago
Forum
Useful Battery ???
Colin H
3 days ago
Forum
Cheddar Electronic gas control valve instructions
Dainesh
3 days ago
Harbour
Re: 3. Old Commodore / Graupner
Len1
3 days ago
Forum
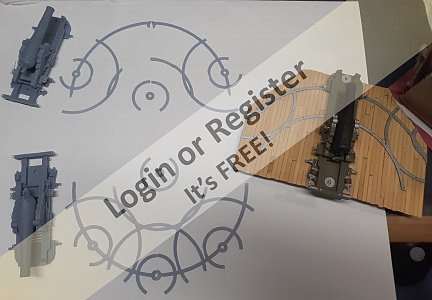
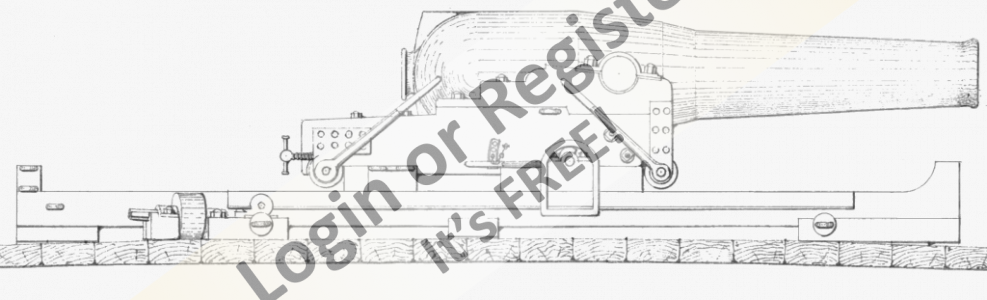
LCM3 landing a Sherman M4A3(105) howitzer
Len1
3 days ago
Harbour
Re: 4. Fishing boat "Aline"
Mike Stoney
4 days ago
Forum
International Associations
Rudy-M
4 days ago
Harbour
Re: 5. Old Stern wheel steamer
Isaac
4 days ago
Forum
Modello RC scala 1/60, di piroscafo armato a goletta, liberamente ispirato alle cannoniere classe US
Len1
4 days ago
Forum
Blast from my past
jumpugly
4 days ago
Doogle
Commodore
4,170 Points
0 seconds ago
mdsrecycles
Recruit
0 Points
4 seconds ago
roycv
Rear Admiral
5,311 Points
8 seconds ago
luckyduck
Midshipman
984 Points
25 seconds ago
Robidoo
Recruit
0 Points
27 seconds ago
RossM
Sub-Lieutenant
1,479 Points
32 seconds ago
BOATSHED
Lieutenant
1,925 Points
35 seconds ago
DWBrinkman
Lieutenant Commander
2,432 Points
39 seconds ago
AlessandroSPQR
Commodore
4,555 Points
2 minutes ago
AlanR
Able Seaman
47 Points
9 minutes ago
RNinMunich
Fleet Admiral
35,651 Points
10 minutes ago
BarryW
Recruit
0 Points
14 minutes ago
bruce1946
Midshipman
925 Points
15 minutes ago
Steam-mad
Able Seaman
41 Points
19 minutes ago
AustinG
Chief Petty Officer 2nd Class
432 Points
29 minutes ago
MikeN12
Recruit
0 Points
36 minutes ago
DGoss999
Warrant Officer
657 Points
37 minutes ago
Peejay
Midshipman
1,065 Points
39 minutes ago
Len1
Sub-Lieutenant
1,444 Points
40 minutes ago
Rudy-M
Warrant Officer
813 Points
41 minutes ago
Niels
Recruit
0 Points
44 minutes ago
Westwind
Chief Petty Officer 1st Class
497 Points
46 minutes ago
ARL58
Petty Officer 1st Class
222 Points
48 minutes ago
Isaac
Warrant Officer
790 Points
53 minutes ago
boatmam
Recruit
0 Points
55 minutes ago
GeoffS
Recruit
5 Points
58 minutes ago
dash8man
Able Seaman
26 Points
58 minutes ago
Maurice
Recruit
12 Points
59 minutes ago
Peter47
Chief Petty Officer 2nd Class
446 Points
1 hour ago
ChrisF
Lieutenant Commander
2,174 Points
1 hour ago
Dainesh
Petty Officer 1st Class
222 Points
1 hour ago
Wolle
Lieutenant Commander
2,296 Points
1 hour ago
DuncanP
Sub-Lieutenant
1,545 Points
1 hour ago
LewZ
Captain
3,783 Points
1 hour ago
geoffreyh
Recruit
0 Points
1 hour ago
Scratchbuilder
Vice Admiral
6,724 Points
2 hours ago
Ronald
Admiral
8,578 Points
2 hours ago
pressonreguardless
Rear Admiral
5,154 Points
3 hours ago
jonbliss152
Leading Seaman
72 Points
3 hours ago
EdW
Midshipman
968 Points
3 hours ago
jumpugly
Lieutenant Commander
2,466 Points
3 hours ago
Commodore-H
Sub-Lieutenant
1,361 Points
3 hours ago
StephenS
Recruit
4 Points
3 hours ago
wmbc40
Leading Seaman
82 Points
3 hours ago
RogerA1
Chief Petty Officer 1st Class
543 Points
3 hours ago
Hey-You
Petty Officer 2nd Class
184 Points
3 hours ago
peterd
Midshipman
960 Points
3 hours ago
Rogal118
Lieutenant Commander
2,462 Points
3 hours ago
tj6287
Recruit
0 Points
3 hours ago
Dane
Able Seaman
36 Points
3 hours ago
Login To
Remove Ads
Remove Ads
🏠
Home
Home
📰
Trending
Trending
💬
Forum
Forum
🗝
Login / Join
Login / Join
|
Cookies are used for ads personalisation.
By using this website you agree to our use of cookies. More Info |
Main Menu
🚤 Model Boats
• Forum
• Build Blogs
• Media Gallery
• Boat Clubs & Lakes
• Events
• Boat Harbour
• How-To Articles
• Useful Links
This Website
🔍 Search
📝 Guestbook
👨👩👧👦 Members (7,852)
📣 Support
Hobby Supplies
🛍️ Online Shop
Login
🗝 Login
🗝 Create New Account
▼
Media Gallery
X
1 of 4
► |
◄ |
Media Viewer
^
_
X
Share
X
Flag Inappropriate Post
X
| Select Reason | |
| Sexual content Includes graphic sexual activity, nudity, and other sexual content. | |
| Violent or repulsive content Violent or graphic content, or content posted to shock viewers. | |
| Hateful or abusive content Content that promotes hatred against protected groups, abuses vulnerable individuals, or engages in cyberbullying. | |
| Harmful dangerous acts Content that includes acts that may result in physical harm. | |
| Child abuse Content that includes sexual, predatory or abusive communications towards minors. | |
| Promotes terrorism Content intended to recruit for terrorist organisations, incite violence, glorify terrorist attacks, or otherwise promote acts of terrorism. | |
| Spam or misleading Content that is massively posted or otherwise misleading in nature. | |
| Infringes my rights Privacy, copyright and other legal complaints. | |
Basket Updated
X
Loading...
Loading
Loading Uploader...